Precisión, precisión del sistema a nivel submilimétrico
Minimamente Invasivo: Reduce significativamente la pérdida de sangre y acorta el tiempo de recuperación del paciente
Eficiente: Permite planificación inteligente y colocación eficiente de tornillos
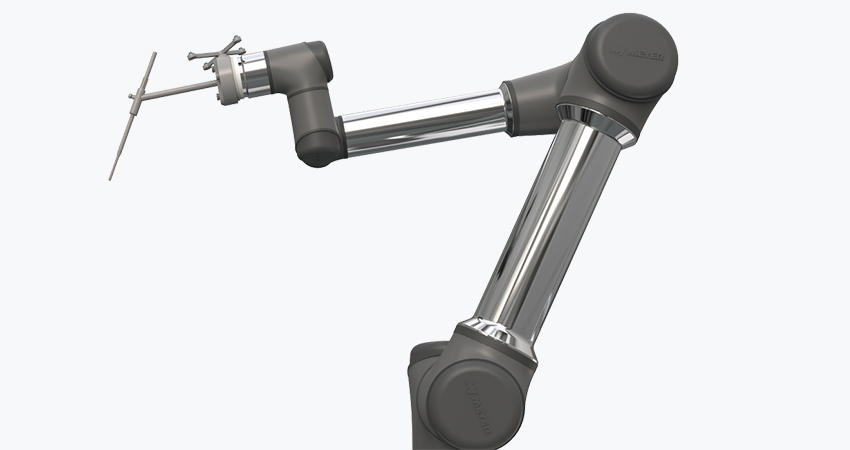
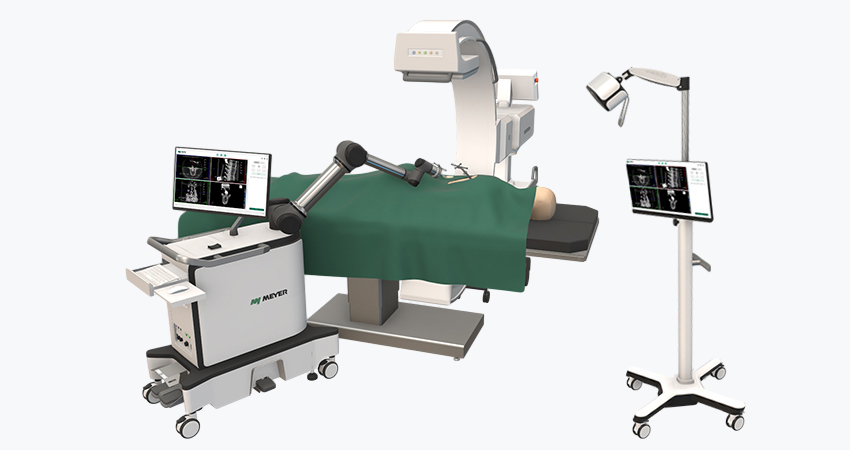
El Robot de Cirugía Espinal de Meyer se utiliza principalmente para la navegación y localización precisa de instrumentos y implantes durante la cirugía espinal, promoviendo un enfoque quirúrgico mínimamente invasivo y preciso.


Visualización del proceso, fácil de usar para los médicos, reduciendo efectivamente el costo de aprendizaje.

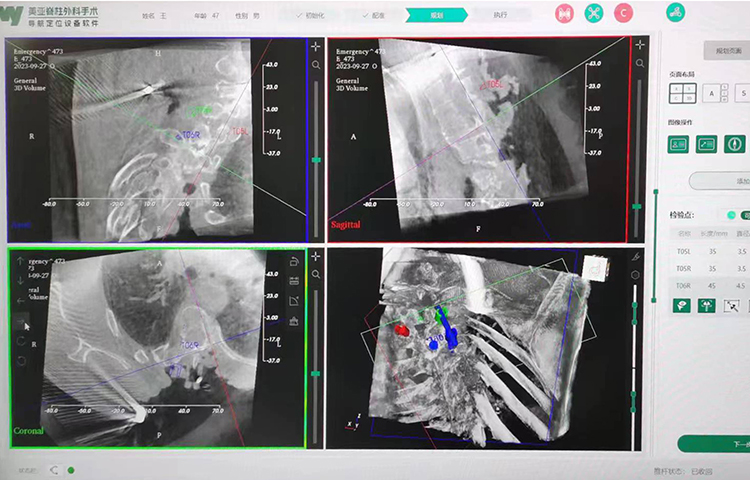
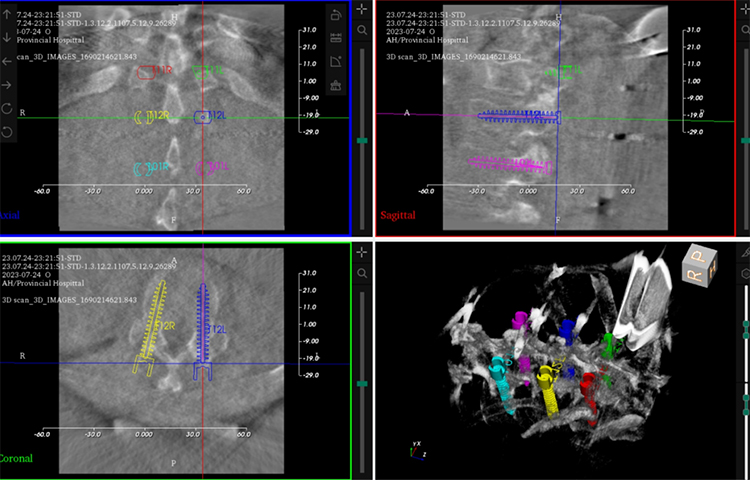
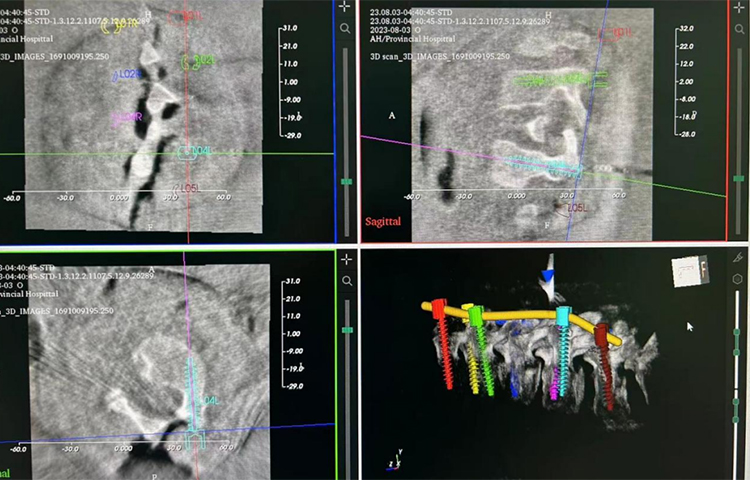
Basada en datos de imágenes 3D, permite simular con precisión los puntos de inserción de los tornillos y su precisión durante la cirugía, mostrando automáticamente el efecto de los tornillos y barras, y la relación de posición entre los tornillos adyacentes, ayudando a evaluar el plan quirúrgico de manera integral, proporcionando mayor confianza al médico.

Doble pantalla que muestra información intraoperatoria de manera sincronizada, facilitando la observación en tiempo real del estado del equipo durante la cirugía.

Soporte para modo de comunicación inalámbrica, reduciendo el retraso y minimizando las conexiones de cables, presentando un espacio quirúrgico limpio y ordenado, reduciendo riesgos de seguridad.

Diseño avanzado estandarizado y modular, que garantiza la consistencia de la máquina completa, permitiendo un cambio y ensamblaje eficiente del kit de herramientas, facilitando la operación del médico.

Diseño de pedales integrados en ambos lados, facilitando la operación quirúrgica y mejorando la experiencia.

Diseño integrado del brazo mecánico y la unidad de control principal, mejorando la eficiencia de transporte, adecuado para uso repetido en múltiples escenarios, mejorando la experiencia de uso.

Equipado con fuente de alimentación ininterrumpida (UPS), reduciendo el riesgo de fallos de energía imprevistos, garantizando la seguridad de la cirugía.
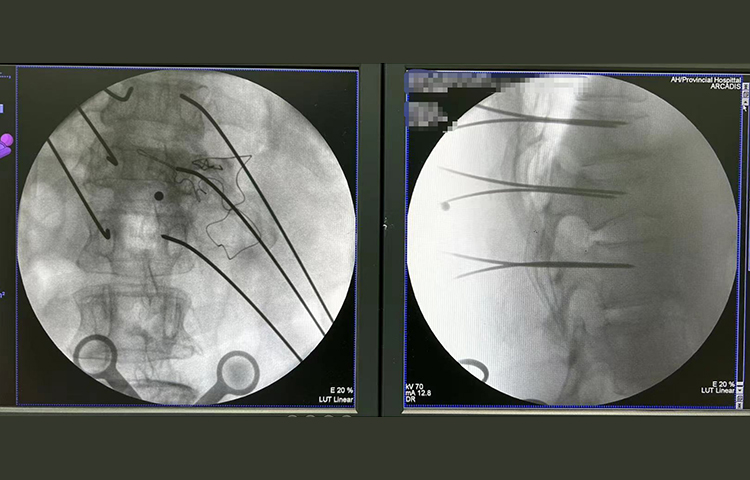
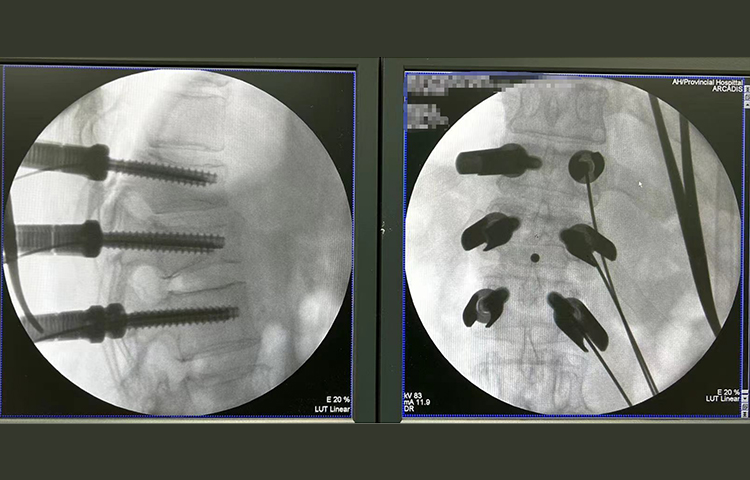
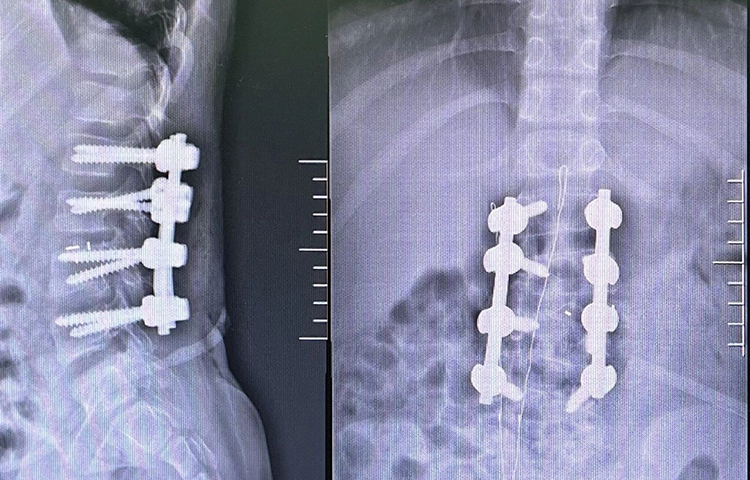
Información básica: Mujer, 70 años Diagnóstico: Fractura T12 SPlan quirúrgico: Cirugía mínimamente invasiva de fijación percutánea de tornillos pediculares


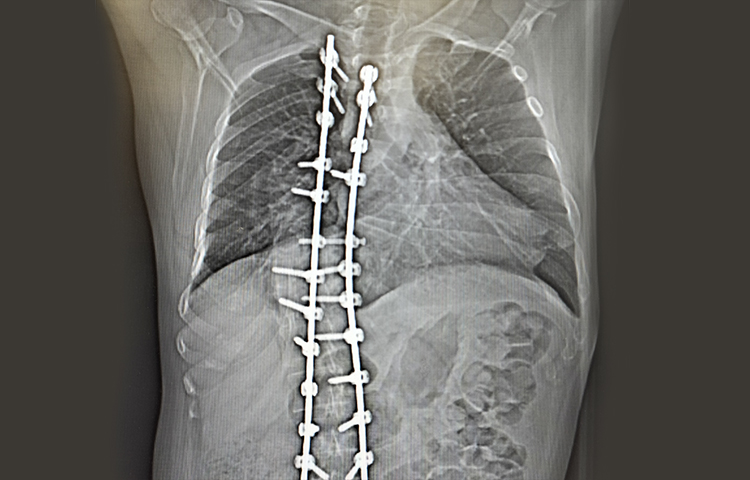
Información básica: Varón, 9 años Diagnóstico: Hemivértebra L3 con deformidad por escoliosis vertebral Plan Quirúrgico: Resección de hemivértebra L3 + fusión intercorporal + cirugía de fijación interna con corrección de barras



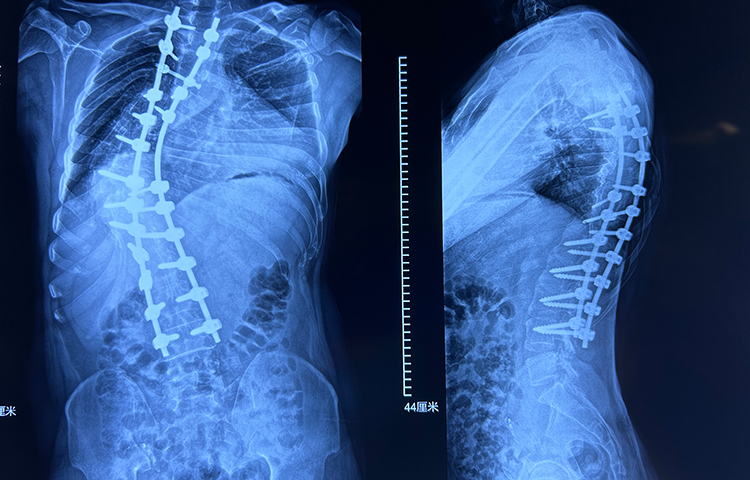
Información básica: Varón, 43 años Diagnóstico: Escoliosis severa, no se utilizó robot en la primera cirugía, efecto de corrección moderado, aflojamiento de los implantes debido a la fuerza externa después de la cirugía, los tornillos invaden el canal espinal Cirugía de revisión de escoliosis