







Precision, System Accuracy Reaching Sub-millimeter Level
Minimally Invasive, Significantly Reducing Blood Loss and Shortening Patient Recovery Period
Efficient, Capable of Intelligent Planning and Efficient Nail Placement









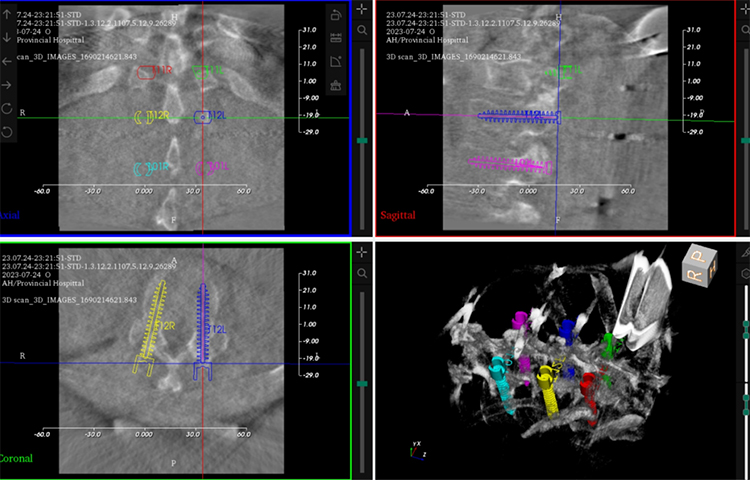
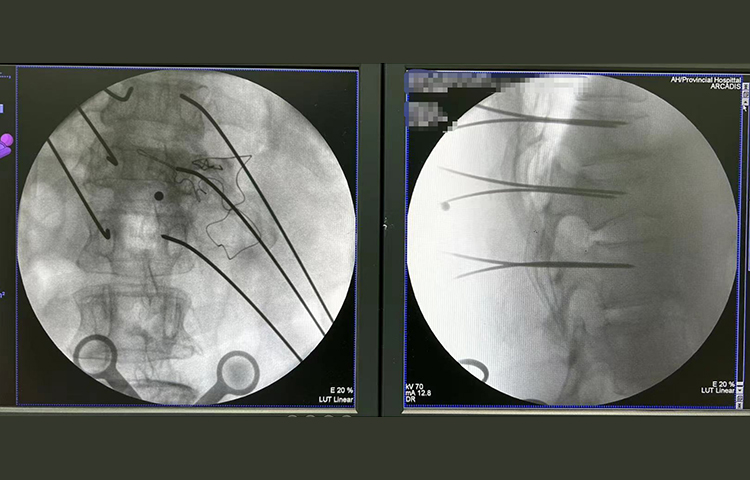
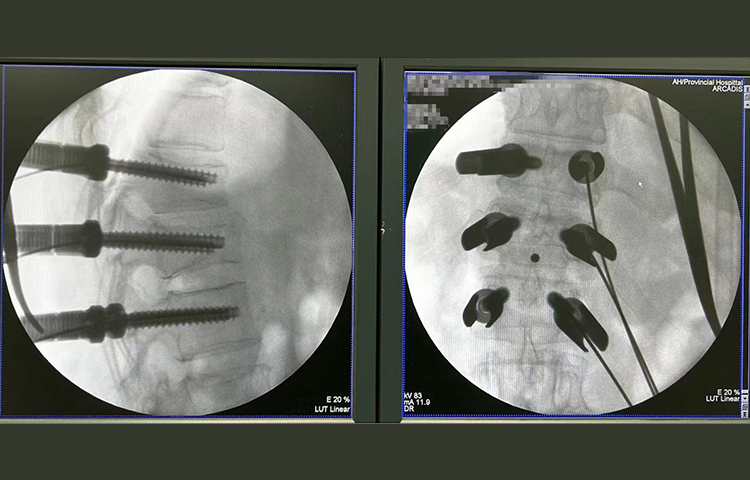
Basic Information: Female, 70 years old Diagnosis: T12 fracture Surgical Plan: Minimally invasive percutaneous pedicle screw fixation surgery


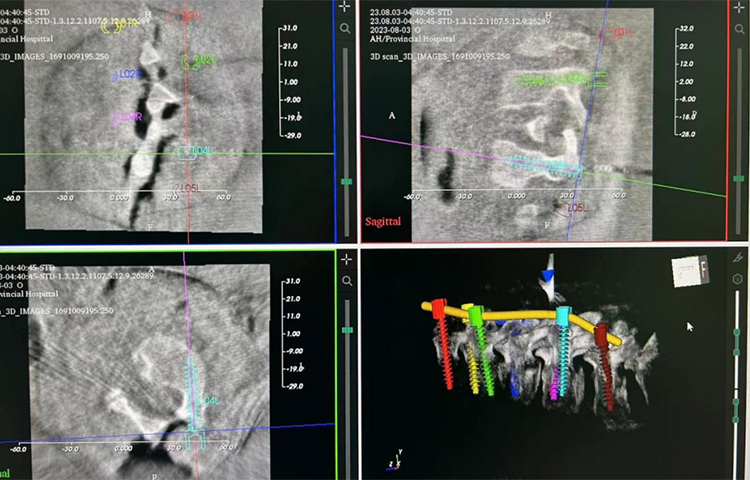
Basic Information: Male, 9 years old Diagnosis: L3 hemivertebra with spinal scoliosis deformity Surgical Plan: L3 hemivertebra resection + interbody fusion + rod correction internal fixation surgery


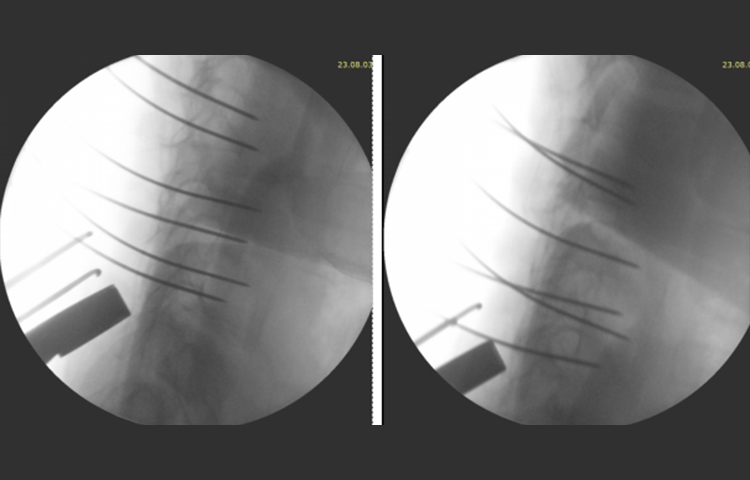
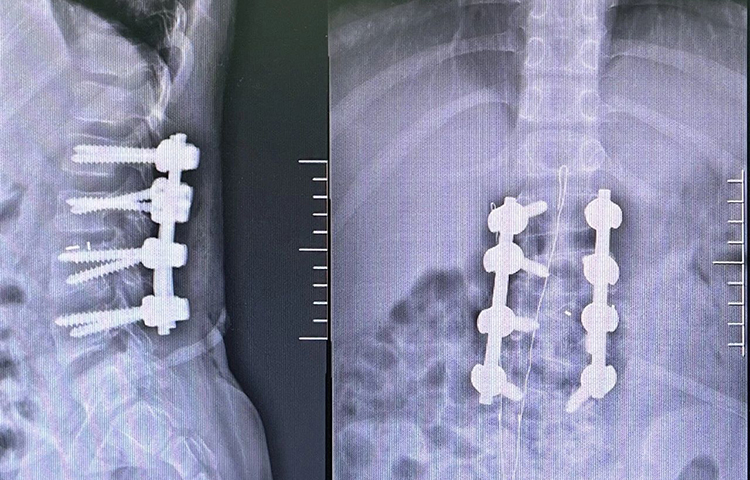
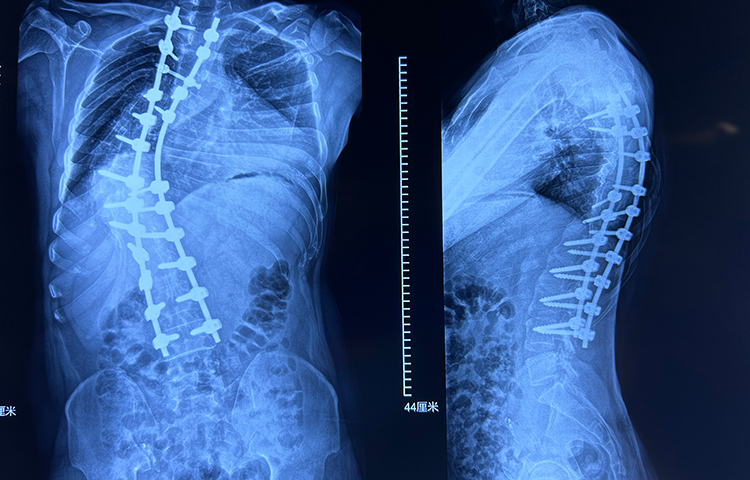
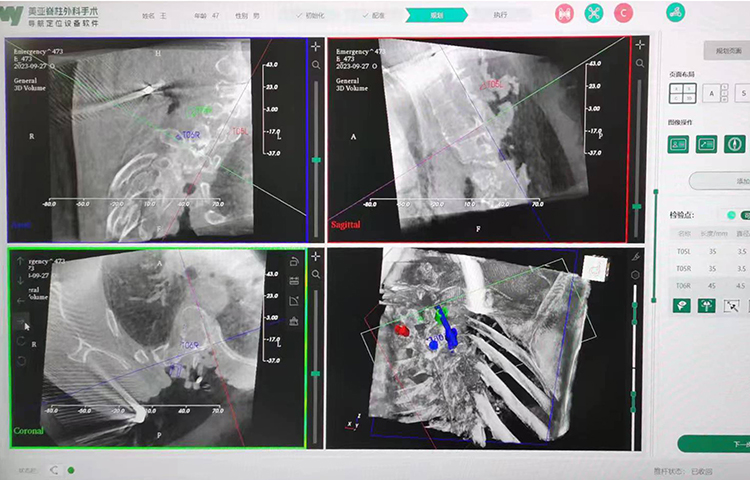
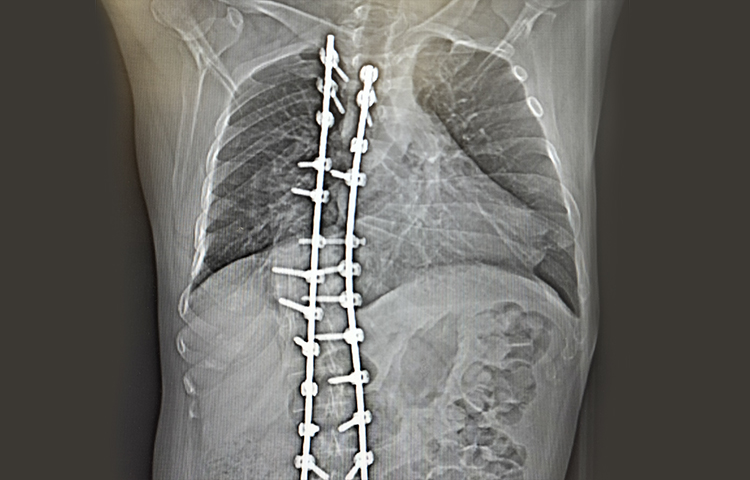
Basic Information: Male, 43 years old Diagnosis: Severe scoliosis, no robot used in the first surgery, moderate correction effect, loosening of implants due to external force after surgery, screws invading the spinal canal Surgical Plan: Scoliosis revision surgery












-

 CONTACT ONLINE
CONTACT ONLINE
-

 healthcare@meyerop.com
healthcare@meyerop.com
-

